System Architecture
In the introduction I mentioned that Rust allows us to theoretically write everything in Rust. This is a sketch of how I think the system will look in practice.
System boundaries
Here are the main categories of systems I see:
- Sensor - interprets information about the world and convert it into data.
- State - represents the configuration of a system (and persists it!).
- Physical state governs interactions with the physical world.
- Logical state governs interactions within software.
- Operator - moves, mutates, and/or queries state or sensor data.
- Actuator - changes a physical state.
- Transport - moves data between systems.
- Agent - a system that combines sensors, state, operators, and actuators. Agents send and receive messages (or commands) to or from other agents.
- User Interface - a system that allows a human to observe or change data.
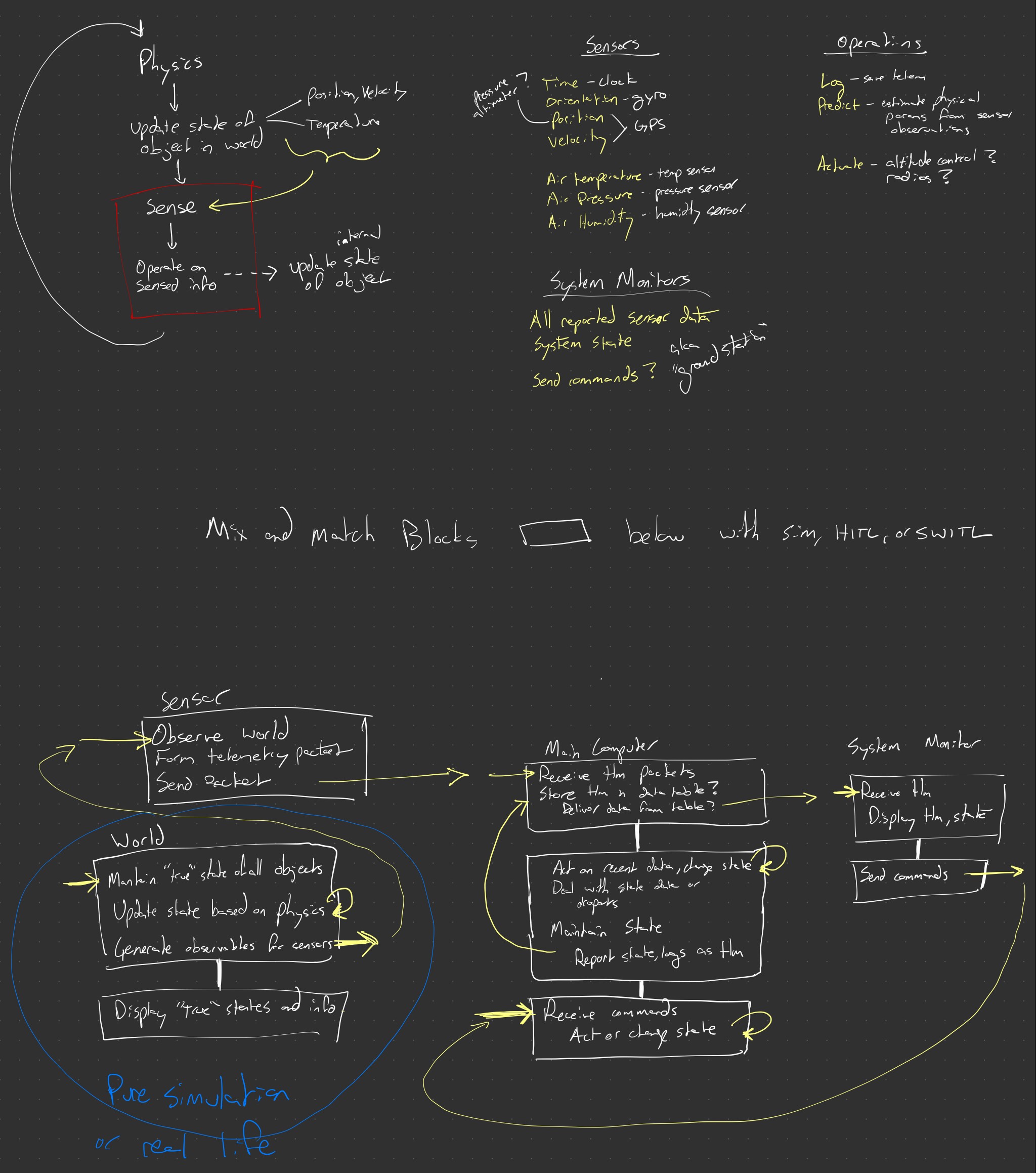
Let's see if we can break down those systems into "blocks" of systems.
- The World - Updating the "world state" of physical objects is pretty much a self-contained system. There are known physics rules and the state of those objects continues to evolve by those rules without any external input from an agent.
- Sensors - Physically, sensors are self-contained systems. They observe data about the world and convert it into some format, then ship it elsewhere. The source of the observation and the destination of the data can be abstracted or simulated or whatever. Sensors are often simple hardware systems. I think we can exclude microcontrollers from this category.
- Computers - Regardless of whether a computer is a microcontroller or runs an operating system or whatever, in this case I mean it as a system that takes in data, does something with it, and then outputs data. At the most basic level this would be a logger. More complicated systems could be an altitude controller. These systems are often much larger than sensors, but can still be contained relatively cleanly (and often along hardware boundaries).
- User Interfaces - CLIs or UIs that allow a human to observe or interact with a system are also nearly-completely self-contained systems and independent from all of the other systems at play.
Each of these "blocks" represents a system boundary that can be swapped in or out with a simulation, abstraction, or an actual physical system. (The obvious exception here is the "world" block, but hopefully it is equally obvious how to swap that out with a simulation or real system... you fly it!)
| Block | Examples | Flavor of Rust | Project |
|---|---|---|---|
| Sensors | IMU, GPS, etc. | Embedded Rust (no-std) | ahab |
| Computers | Logger, altitude controller, etc. | Regular Rust (std) or embedded Rust (no-std) | ahab |
| The World | Physics engine, weather simulation, etc. | Bevy (game engine) and/or regular Rust (std) | yahs |
| User Interfaces | CLI, web app, etc. | Bevy (game engine), Egui, and/or regular Rust (std) | yahs |
To simplify things (ha!) we can offload the "world" and UI blocks to other projects like yahs. Codevelopment is good but spaghetti interdependencies are bad.
Data interfaces
The data interfaces are the most important part of the system. They are the glue that holds everything together. Unfortunately, they are also the things that have to be flexible enough to support a simulation, abstraction, or real-world system.
I think we can get over this hump by using data interface patterns that lean on software patterns that can be modeled or abstracted in a simulation environment. So things like message queues, async/await, ethernet and other network protocols, and databases can be modeled in a simulation environment and still be implemented in the hardware in pretty much the same way. That's the claim, anyway.