Getting started with the STM32F411VE
Here are some notes on how to set up a development environment to work on this project. YMMV.
I recommend following this video tutorial to get started.
We'll use the STM32F411VE as our target system.
Setting up your development environment
- Install Rust 1.31 or newer.
- Add cortex-m targets to your toolchain. We are using Cortex-M4F, so:
rustup target add thumbv7em-none-eabihf - Read the Embedded Rust Book in its entirety. Just kidding, but it's a good idea to bookmark it.
- If you're using VSCode or one of its derivatives, install the rust-analyzer extension and the Cortex-Debug extension. There are some more details here for advanced configurations.
Setting up the project
Configuring the compiler target
A target triple is a string that describes the target architecture, vendor, operating system, and environment.
<arch><subarch>-<vendor>-<sys>-<env>
archis the architecture, e.g.arm,x86,aarch64, etc.subarchis the subarchitecture, e.g.v7,v8,v9, etc.vendoris the vendor, e.g.none,apple,nvidia,intel, etc.sysis the operating system, e.g.none,linux,windows,macos, etc.envis the environment, e.g.eabihf,gnu,musl, etc.
Both the MSP432 and the STM32F411E use the Cortex-M4F with a floating point unit. This chip is part of the ARMv7e-M architecture family.
The rustc docs show
that the target triple for ARMv7E-M is thumbv7em-none-eabi or
thumbv7em-none-eabihf.
- The
thumbv7emprefix indicates that our Cortex-M4F uses the Thumb-2 instruction set and the ARMv7E-M architecture. - The
nonevendor indicates that the target does not have an operating system. - The
eabioreabihfsuffix indicates the ABI to use. Since we have an FPU, we use theeabihfvariant.
Now that we know the target triple, we can add it to the cargo toolchain on our
host machine and in our .cargo/config.toml file to tell the compiler how to
build code for the project's target.
# add the target architecture to the toolchain
rustup target add thumbv7em-none-eabihf
And to make sure the correct target and flags are used every cargo build, we
can add the following to our .cargo/config.toml file so we don't have to type
it out every time.
[build]
target = "thumbv7em-none-eabihf" # Cortex-M4F and Cortex-M7F (with FPU)
[target.thumbv7em-none-eabihf]
rustflags = ["-C", "link-arg=-Tlink.x"]
But the IDE might still complain about failing to build the project for the host architecture. We can instruct the IDE extensions to only build for the embedded target by adding some extra configs. The following is an example for VSCode.
// .vscode/settings.json
{
"rust-analyzer.cargo.allTargets": false,
"rust-analyzer.cargo.target": "thumbv7em-none-eabihf"
}
The cortex-m-quickstart
also includes a build.rs file that sets up the target triple and the linker
script, accounting for some of the edge cases that can happen when building to
make sure that the linker actually sees the memory.x file and stuff. Be
careful though, because the build.rs file also sets the rustflags so we have
to remove them from the .cargo/config.toml file if we use the build.rs file.
Configuring the Cortex-M crates
The embedded Rust tools make it easy to build and run programs on the target but require a little extra setup to get running for our specific target.
The first crate to set up is the runtime crate, cortex-m-rt. This crate
provides the entry! macro, which is used to mark the entry point of the
program, and interrupt handling.
// src/main.rs #![no_std] #![no_main] use cortex_m_rt::entry; #[entry] fn main() -> ! { loop { // your code goes here } }
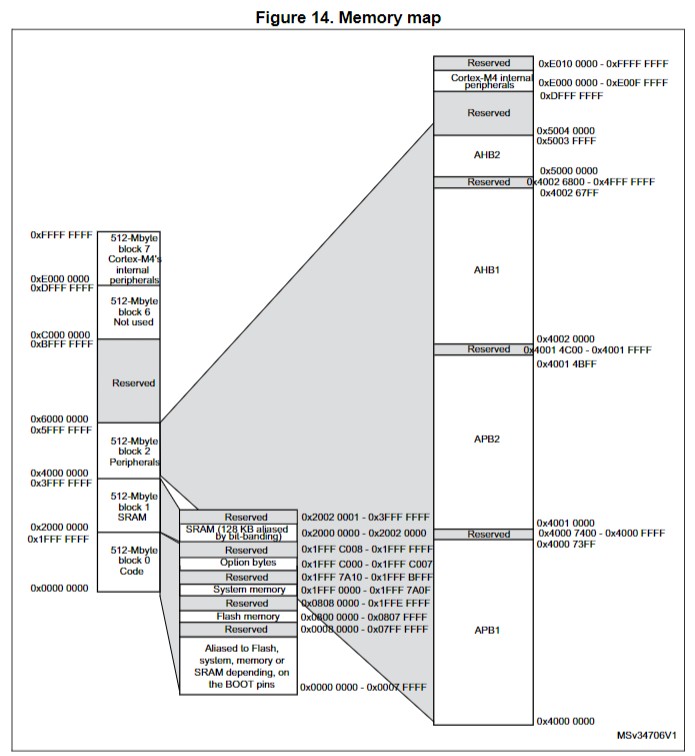
The cortex-m-rt crate expects
a memory.x file that specifies the flash and RAM memory layouts of the target.
According to the datasheet, the flash memory is at 0x0800 0000 - 0x0807 FFFF
and the RAM is at 0x2000 0000 - 0x2002 0000.
Another thing that is required by the cortex-m-rt runtime is a panic handler.
A panic handler accepts a PanicInfo argument and never returns. This code will
run when the program (our code or a dependency) panics. It is required!
#![allow(unused)] #![no_std] fn main() { #[panic_handler] fn panic(_info: &PanicInfo) -> ! { // do something } }
There are more advanced ways to handle panics, including a number of third-party
crates, but for now we'll just set up a basic one: panic-halt. This crate
makes an infinite loop happen when a panic occurs, which can be helpful when
debugging. We should replace it later. Now we're not actually using the
crate's functions, but we need to declare it so the compiler knows it exists.
// src/main.rs #![no_std] #![no_main] use cortex_m_rt::entry; use panic_halt as _; #[entry] fn main() -> ! { loop { // your code goes here } }
Flashing the device
There are a few more toolchains to install for ergonomics. llvm-tools enables
some low-level debugging and inspection features, and cargo-binutils is a more
ergonomic wrapper around llvm-tools.
rustup component add llvm-tools
cargo install cargo-binutils
Here's an example of how to use cargo-binutils to inspect the binary.
❯ cargo size -- -Ax
Finished `dev` profile [unoptimized + debuginfo] target(s) in 0.02s
ahab_stm32f11ve :
section size addr
.vector_table 0x400 0x8000000
.text 0x70 0x8000400
.rodata 0 0x8000470
.data 0 0x20000000
.gnu.sgstubs 0 0x8000480
.bss 0 0x20000000
.uninit 0 0x20000000
.debug_abbrev 0x145d 0x0
.debug_info 0x23eef 0x0
.debug_aranges 0x1338 0x0
.debug_ranges 0x1b720 0x0
.debug_str 0x3d91c 0x0
.comment 0x99 0x0
.ARM.attributes 0x3a 0x0
.debug_frame 0x4218 0x0
.debug_line 0x2184d 0x0
.debug_loc 0x29 0x0
Total 0xa5691
One last tool is needed to flash the device. probe-rs is a tool that allows
you to interact with embedded devices, including flashing. Installation can vary
by OS, see probe-rs docs
for details. If you're on Windows, you might need to install
some drivers.
Let's see if probe-rs supports the STM32F411VE.
❯ probe-rs chip info stm32f411ve
stm32f411ve
Cores (1):
- main (Armv7em)
NVM: 0x08000000..0x08080000 (512.0 kiB)
RAM: 0x20000000..0x20020000 (128.0 kiB)
NVM: 0x1fffc000..0x1fffc004 (4 B)
NVM: 0x1fff7800..0x1fff7a10 (528 B)
Yep! Now we want to use cargo embed to flash the device. cargo-embed is the
big brother of cargo-flash. It can also flash a target just like
cargo-flash, but it can also open an RTT terminal as well as a GDB server.
❯ cargo embed --chip stm32f411ve
Finished `dev` profile [unoptimized + debuginfo] target(s) in 0.03s
Config default
Target E:\repos\philiplinden\ahab\target\thumbv7em-none-eabihf\debug\ahab_stm32f11ve
Erasing ✔ 100% [####################] 16.00 KiB @ 40.12 KiB/s (took 0s)
Programming ✔ 100% [####################] 2.00 KiB @ 4.08 KiB/s (took 0s)
Finished in 0.49s
Done processing config default
We can cache the chip info so we don't have to type it out every time using an
Embed.toml file that cargo embed will look for in the project root.
# Embed.toml
chip = "stm32f411ve"
Now we can run cargo embed and it will pull the arguments from the config.
❯ cargo embed
Finished `dev` profile [unoptimized + debuginfo] target(s) in 0.02s
Config default
Target E:\repos\philiplinden\ahab\target\thumbv7em-none-eabihf\debug\ahab_stm32f11ve
Erasing ✔ 100% [####################] 16.00 KiB @ 40.25 KiB/s (took 0s)
Programming ✔ 100% [####################] 2.00 KiB @ 4.15 KiB/s (took 0s)
Finished in 0.48s
Done processing config default
😎